New Online Sexual Harassment Service
Filed under Website
We live in an era of many sexual scandals such as #metoo and Harvey Weinstein. Unfortunately, the number of cases has gone up in the past few years, 76,418 in 2018 alone (according to the EEOC). This is an issue that has not disappeared from the workplace and now, more than ever, employers need to better prepare their workforce and prevent more accidents from happening.
There are many tools that organizations can adopt such as fine-tuning the company policy, posting posters with workers rights to the kitchen wall, offer training in-person or online, etc.
While there is no one-size fit-all solution, U.S. organizations need to comply with certain regulations based on their location and size. For example, the state of California requires companies to offer a sexual harassment prevention training to all their employees every two years, or within three months after they join.
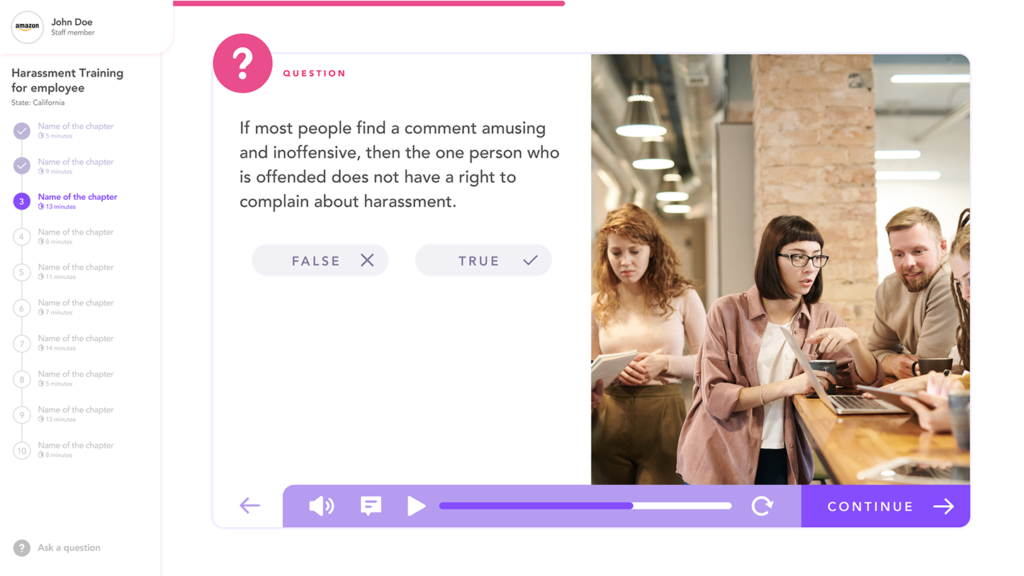
Enter EasyLlama. They offer modern online sexual harassment training for companies of all sizes. It’s very easy to get started (self-serve) and get your team trained online.
It works any any device (mobile phone [iPhone and Android], desktop, tablet, etc.) and the prices are starting at $9.95 for larger companies.
The interface is very intuitive and easy-to-use. You just have to upload the employees list (better if they have an email address), assign them a training and they will receive an invitation by email. BOOM, very easy.
May05



